Ashraf AbuSara · Mar 9, 2025, 01:10 PM
Hello Tobi.
I have owned and used the HAE69ec now probably more than most (I also have the HAE69c without the encoder). I have used it for more than a year. I watched Dark Sky Geek's review, and frankly the one thing that bothered me with that review is he really never bothered to correct his PA because it was "not as straight forward" as his CEM70 or CEM60. I agree with him that the PA process can be a little finnicky, but I never had trouble getting my PA down to under 1' in my backyard in less than 5 minutes, once I got used to its behavior. So it puts some of his other tests after that in question if his PA was never under 40' through out the testing.
I have put multiple scopes on it, most the AG Optical FA12 (55lb payload) with a sampling of and now I have it housed remotely with a TOA-130 on it, and it has been imaging almost every night.
AG Optical was sampled at 0.49"/px, and the TOA-130 is sampled at 0.783"/px.
What is your guiding accuracy? At which sampling/focal length and payload?
Guiding accuracy on average is 0.4-0.45". Often it is under 0.4" under good seeing conditions for targets slightly farther away from the celestial equator. This has held true for both the TOA-130 and the AG Optical FA12.
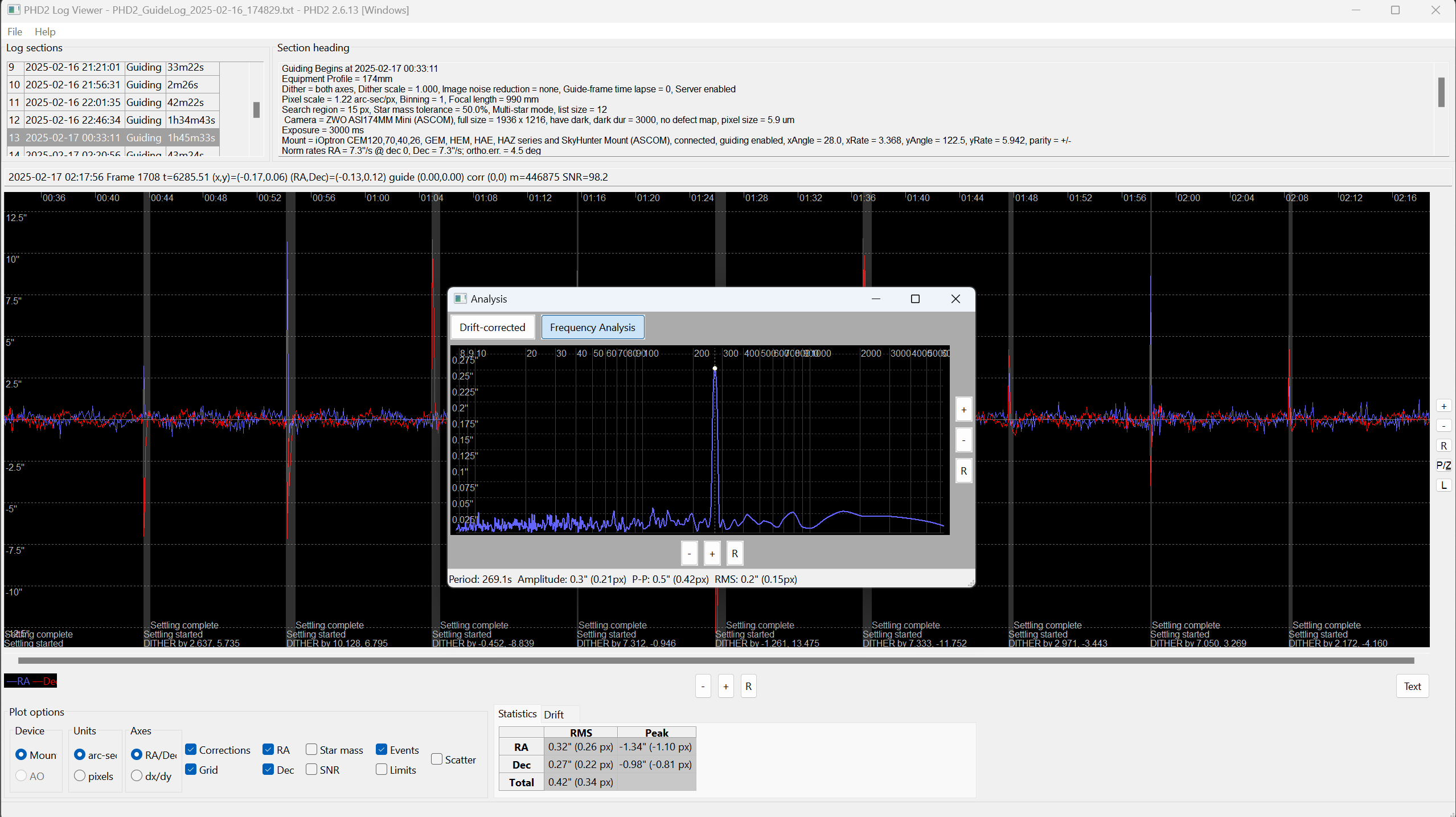
Did you do a frequency analysis in PHD2? Whats your PE with the encoders?
To be clear, there is only one encoder on the RA axis, and it is a "high precision encoder" not an "absolute encoder". The are no encoders on the DEC axis, and it really does not need it. When measuring PE using guiding assistant, I find a native PE value in one period about 3” peak-peak (or +/-1.5”) .
How much is your backlash?
I have tested Backlash in PHD2, and I got some wildly variable results, anywhere from 100ms to 2000ms. When I applied the Backlash compensation settings in PHD2, especially if I used the higher recommendations that are more than 700ms, the guiding actually significantly worsens, and demonstrates that there is significant "overcompensation". I have been guiding without any backlash compensation and it worked much better. I think in reality the backlash is small, but there is something in that test that is producing erratic results. I haven't checked this in a very long time. I might give it another try.
Bottom line, this mount is a step above any other non-encoder based harmonic mounts. It retains the benefits of SWG mounts of being excellent Payload / Mount weight ratio, and the need for CW is optional. Personally I kept using a counterweight on it anyway to improve wind resistance, but obviously no balancing is needed.
Don't expect performance similar to a Mach 2 or a 10micron with absolute encoders. But it has performed well out of the box for me.
In terms of reliability, I have had one issue with the mount. The mainboard failed and it had to be replaced under warranty. iOptron was quick to respond and fix it, and the turnaround was about 3 weeks. I haven't had any issues since.
Hope that helps.
I agree, I think that the youtube video posted by deepskygeek is the biggest dis service that could be done to the HAE69EC. There was a firmware update provided to deal with the oscillations he mentions and my mount is polar aligned and easily achieved .5rms without the ecoder even calibrated. I suspect results will be even better when I calibrate the encoder and power cycle the mount.
My biggest criticism of this mount is that it does not have a home sensor. I also believe that they could have adopted some sort of pier crash detection. I suppose iOptron did not anticipate that users would deploy this mount to a permenent pier.
Also mine has the iMate computer which is not useful at all. They should make a kit to swap this out with a usb and power saddle pass through only.
Another thing I have heard is that this mount is prone to voltage surges and mainboard failure. you can solder a 16v TVS Diode in line with the 12v power input to prevent surges form hitting the mainboard, iOptron should have built that into the board.
Finally, I wish you could more easily replace the saddle clamp with a larger 10 or 12” clamp, because of iMate and the internal structure of the saddle, this would require extensive machining and R&D.
The great things about this mount are, that wind has very little impact on its tracking performance because the spline engages the teeth under compression from both sides, so the backlash in these systems is really just a multiplier from the belt pulley.
They do not need to be 3D balanced or any kid of finniky balance which means after a meridian flip, they just continue behaving the way they did.
The precision you can achieve is excellent, the encoders additionally allow you to push OAG exposures out to about 3s so you can always find a star.
While there are no home sensors, the EC version can use its encoders to find zero position which is useful if you loose power, but note it does not retain memory of where it was pointed before the power cycle like with absolute encoders.
iOptron commander software works very well
In a non permanent setting, the mount only weighs 20 lbs and can be easily setup.